
з”өеҠЁиҪҰз”өжңәй©ұеҠЁзі»з»ҹзҡ„е·ҘдҪңзӮ№еҲҶжһҗ
2016-05-11
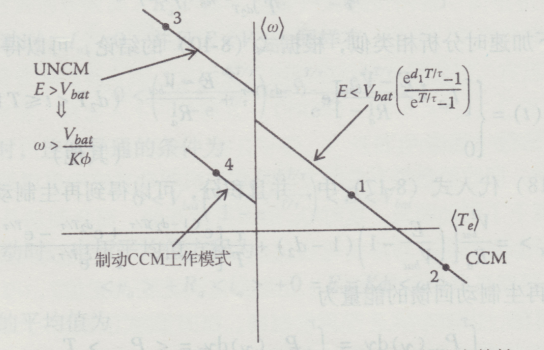
з”өеҠЁиҪҰзі»з»ҹзҡ„зЁіжҖҒе·ҘдҪңзӮ№еҲҶжһҗпјҢе·ҘдҪңзӮ№еҚіз”өжңәиҪ¬зҹ©дёҖи§’йҖҹеәҰзү№жҖ§жӣІзәҝдёҺи·ҜйқўиҙҹиҪҪзү№жҖ§жӣІзәҝзҡ„дәӨзӮ№гҖӮиҝҷйҮҢйҖүеҸ–дәҶз”өжңәиҪ¬зҹ©-и§’йҖҹеәҰе№ійқўдёҠ3дёӘиұЎйҷҗдёӯзҡ„4дёӘе·ҘдҪңзӮ№пјҢеҲҶеҲ«д»ЈиЎЁдәҶ4з§Қж–©жіўеҷЁиҝҗиЎҢжЁЎејҸпјҢе®ғ们жҳҜиұЎйҷҗеҶ…еҠ йҖҹCCMпјҲ第1з§Қжғ…еҶөпјүпјҢ第еӣӣиұЎйҷҗеҶ…еҠ йҖҹCCMпјҲ第2з§Қжғ…еҶөпјүгҖӮ
第дәҢиұЎйҷҗеҠ йҖҹдёҚеҸҜжҺ§жЁЎејҸ(UNCM)пјҲ第3з§Қжғ…еҶөпјүпјҢ第дәҢиұЎйҷҗеҲ¶еҠЁCCMпјҲ第4з§Қжғ…еҶөпјүпјҢиҝҷ4з§Қжғ…еҶөеҰӮеӣҫжүҖзӨәгҖӮ
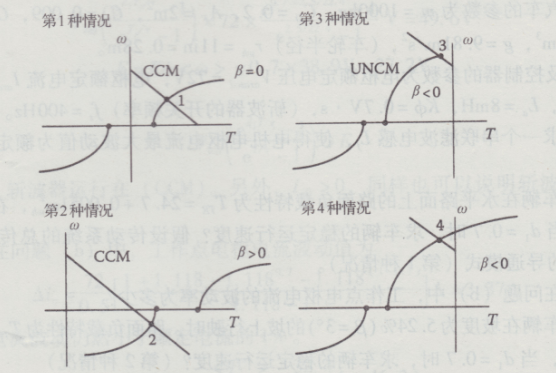
ж–©жіўеҷЁ4з§ҚиҝҗиЎҢжЁЎејҸж—¶з”өжңәзҡ„иҪ¬зҹ©дёҖи§’йҖҹеәҰзү№жҖ§
зүөеј•еҠӣе’ҢиҪҰиҫҶйҖҹеәҰзү№жҖ§д№Ӣй—ҙзҡ„е…ізі»пјҢеҸӘиҰҒзҹҘйҒ“еҸҳйҖҹеҷЁдј еҠЁжҜ”е’ҢиҪҰиҪ®еҚҠеҫ„пјҢж №жҚ®зүөеј•еҠӣе’ҢйҖҹеәҰзү№жҖ§пјҢиҪҰиҫҶеҸҜд»ҘйҖҗжӯҘиҝҮжёЎеҲ°иҪҰиҫҶйҳ»еҠӣдёҺиҪ¬зҹ©-иҪ¬йҖҹзү№жҖ§зӣёе№іиЎЎзҡ„зҠ¶жҖҒгҖӮеңЁз”өжңәй©ұеҠЁзі»з»ҹе’Ңи·Ҝйқўйҳ»еҠӣзү№жҖ§зҡ„зү№е®ҡжғ…еҶөдёӢпјҢиҪҰиҫҶзҡ„зЁіжҖҒе·ҘдҪңзӮ№еҸҜд»ҘйҖҡиҝҮе°ҶдёӨдёӘиҪ¬зҹ©_иҪ¬йҖҹеӣҫж”ҫеңЁеҗҢдёҖдёӘеӣҫдёҠеҫ—еҲ°гҖӮж №жҚ®з”өжңәе’Ңи·Ҝйқўйҳ»еҠӣзү№жҖ§зӣёдә’е…ізі»еҫ—еҲ°иҪҰиҫҶзҡ„зЁіжҖҒе·ҘдҪңзӮ№пјҢеҰӮеӣҫжүҖзӨәгҖӮ
еҗ„з§Қе·ҘдҪңжЁЎејҸдёӢе·ҘдҪңзӮ№еҲҶжһҗ
第1з§Қжғ…еҶө
еңЁиҝҷз§Қжғ…еҶөдёӢпјҢиҪҰиҫҶеңЁж°ҙе№іи·ҜйқўдёҠжҒ’йҖҹеҗ‘еүҚиЎҢ驶гҖӮж–©жіўеҷЁиҝҗиЎҢеңЁеҠ йҖҹ(CCM)гҖӮ
第2з§Қжғ…еҶө
ж–©жіўеҷЁиҝҗиЎҢеңЁеҠ йҖҹ(CCM)пјҢдҪҶжҳҜиҪҰиҫҶеҚҙжҳҜеңЁдёҠиЎҢзҡ„йҷЎеқЎдёҠеҗ‘дёӢжәңиҪҰгҖӮеҰӮжһңеҚ з©әжҜ”жІЎжңүиҫҫеҲ°пјҢеҸҜд»ҘйҖҡиҝҮиё©еҠ йҖҹиёҸжқҝдҪҝd1дёҖзӣҙеҸҳеӨ§еҲ°1дёәжӯўпјҢиҝҷж ·еҸҜд»ҘеўһеҠ з”өжңәзҡ„иҫ“еҮәиҪ¬зҹ©гҖӮдҪҝd1еҸҳеӨ§еҸҜд»ҘжҳҺжҳҫең°жҸҗй«ҳз”өжңәзҡ„иҪ¬зҹ©дёҖи§’йҖҹеәҰзү№жҖ§пјҢд»ҘдҫҝеңЁиұЎйҷҗдёӯеҸҜд»ҘиҫҫеҲ°зЁіе®ҡе·ҘдҪңзӮ№гҖӮеҰӮжһңз”өжңәйўқе®ҡеҖје·Із»ҸиҫҫеҲ°жһҒйҷҗеҖјпјҢжӯӨж—¶з”өжңәиҪ¬зҹ©д№ҹе°ұдёҚиғҪеҶҚеўһеҠ дәҶпјҢд»ҺиҖҢж— жі•е…ӢжңҚи·Ҝйқўйҳ»еҠӣгҖӮеҰӮжһңеқЎеәҰеӨӘйҷЎпјҢз”өжңәеҠҹзҺҮж— жі•е…ӢжңҚиҪҰиҫҶйҳ»еҠӣпјҢиҪҰиҫҶе°ҶдјҡжәңиҪҰгҖӮеңЁиҝҷз§Қжғ…еҶөдёӢпјҢиҪҰиҪ®е°ҶдјҡжӢ–зқҖз”өжңәеҸҚиҪ¬гҖӮ
第3з§Қжғ…еҶө
иҪҰиҫҶдёӢеқЎж—¶пјҢж–©жіўеҷЁиҝҗиЎҢеңЁеҠ йҖҹжЁЎејҸгҖӮж— и®әжҖҺж ·иё©еҠ йҖҹиёҸжқҝпјҢиҪҰиҫҶйғҪж— жі•иҝҗиЎҢеңЁзЁіжҖҒе·ҘдҪңзӮ№пјҢиҖҢдё”еҶҚз”ҹеӣһ收зҡ„иғҪйҮҸдёҚеҸҜжҺ§гҖӮ
第4з§Қжғ…еҶө
иҪҰиҫҶдёӢеқЎж—¶пјҢиҝҗиЎҢеңЁеҸҜжҺ§жЁЎејҸпјҢйҖҡиҝҮеҲ¶еҠЁиёҸжқҝжқҘжҺ§еҲ¶гҖӮиҪҰиҫҶдёӢеқЎзҡ„йҖҹеәҰеңЁй©ҫ驶е‘ҳзҡ„жҺ§еҲ¶иҢғеӣҙеҶ…гҖӮ
дёӢдёҖзҜҮпјҡ ж–°иғҪжәҗжұҪиҪҰз”Ёз”өжңәеҸҠе…¶жҺ§еҲ¶еҷЁз”өзЈҒе…је®№жҖ§жөӢиҜ•ж–№жі•жҺўи®Ё





